了解公司最新动态和行业资讯
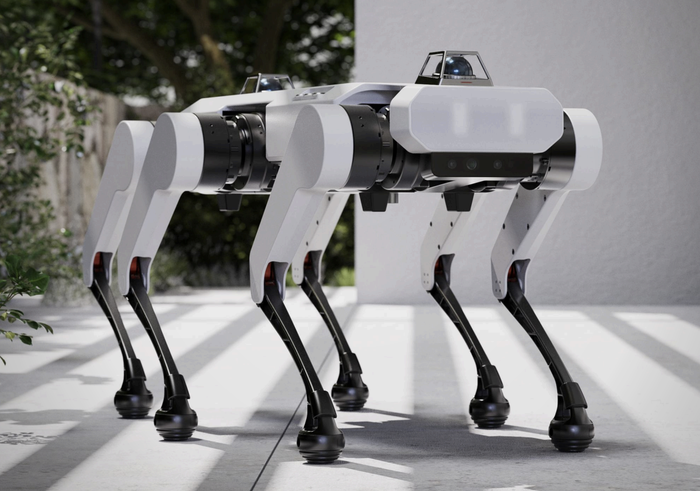
四足机器人作为行走的智能体,凭借仿生机械结构与AI技术融合,在非结构化地形具备强适应性,核心技术聚焦驱动、感知、控制与AI决策,应用已覆盖工业巡检、应急救援等多...
四足机器人凭借仿生形态与智能技术,正突破轮式/履带式机器人的地形局限,在工业、军事、救援等领域加速落地,成为仿生科技走向规模化应用的标杆。以下从技术、应用、趋势...
四足机器人凭借仿生腿部结构与智能控制技术,成为复杂场景下极具适应性的移动解决方案,其核心在于通过感知 - 决策 - 执行的闭环系统,实现对非结构化地形、极端环境...
四足机器人的进阶之路,核心是从“稳定行走”到“动态智能”的技术跃迁,当前正通过运动控制、感知决策、驱动能效、形态融合四大方向突破,加速向规模化商用与全场景自主迈...
四足机器人凭借仿生设计与智能技术,正以全地形适应、高危作业替代、智能协同等核心能力,成为未来智能装备的核心力量,推动各领域生产力与安全水平的跃升。以下从核心价值...
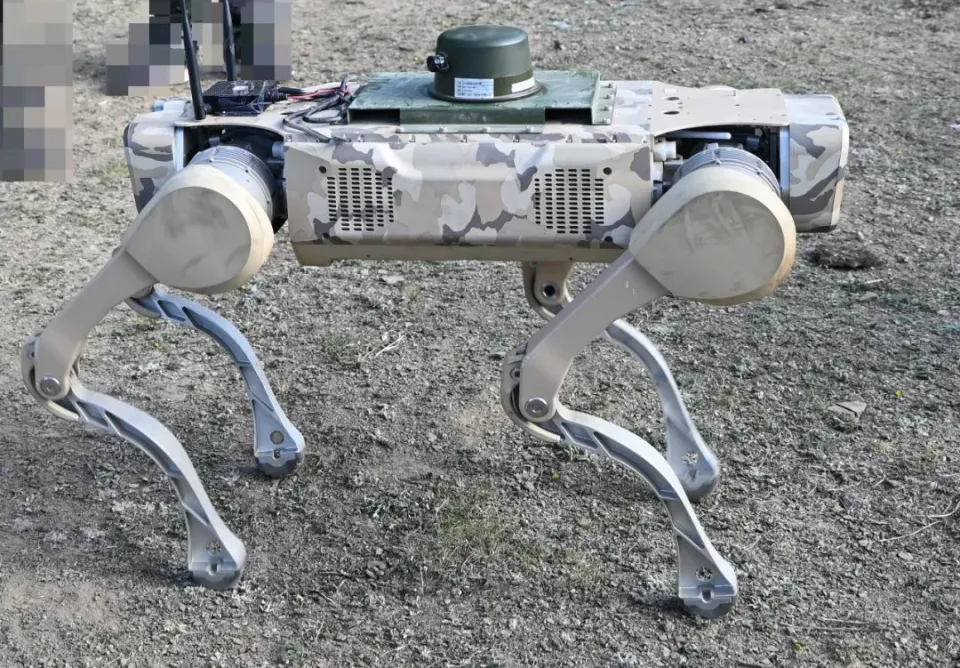
四足机器人凭借具身智能+大模型、高功率密度驱动、多模态感知融合与模块化工程化四大硬核技术突破,正快速成为智能装备新主角,在工业、安防、特种作业等领域实现规模化落...
四足机器人凭借其仿生四足结构与环境适应能力,正从实验室快速渗透到工业、应急、民生、科研等多个场景,核心在于解决“人难去、人危险、人低效”的痛点,实现从技术验证到...
四足机器人实现步态更稳、感知更准,核心在于运动控制、感知融合、驱动与计算平台的协同突破,通过动态闭环与多模态数据处理,达成复杂场景下的自适应稳定与精准认知。以下...
四足机器人已从单纯仿生演示进化为跨场景实用装备,核心技术迭代推动其突破传统应用边界,同时也面临物理、成本、伦理等多重约束,当前价值集中在高危替代与复杂场景作业,...
在工业巡检、应急救援、户外勘探等场景中,传统轮式、履带式机器人受限于地形障碍,难以在山地、废墟、丛林、台阶等复杂非结构化环境中高效作业,而四足机器人凭借仿生物的...