了解公司最新动态和行业资讯
一、四足机器人核心研究成果概述近年来,四足机器人凭借仿生设计优势与复杂环境适配能力,在核心技术领域取得多项突破,逐步从实验室演示走向商业化应用。在感知决策层面,...
四足机器人作为腿足式移动机器人的核心分支,凭借对非结构化地形的超强适配能力,正从实验室演示迈向规模化商用。当前核心研究成果集中在感知、决策、控制、驱动四大维度,...
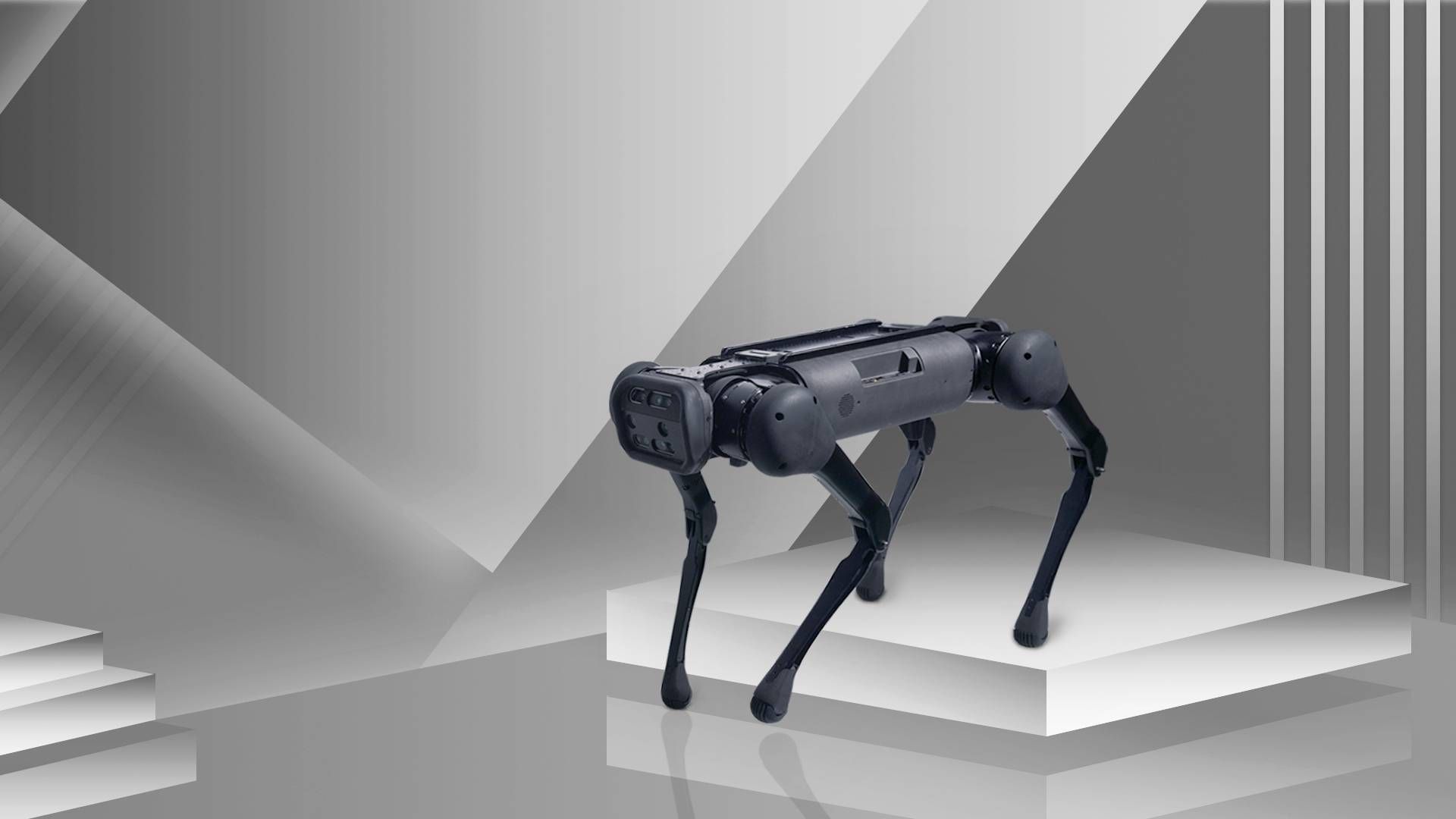
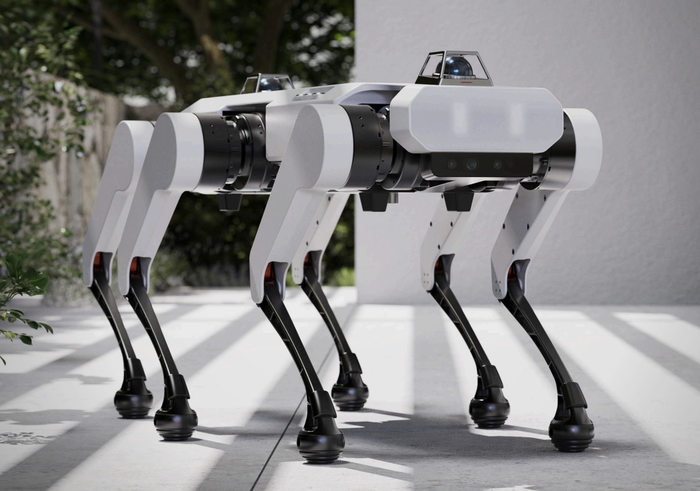
四足机器人的核心研究集中在机械结构、感知决策、运动控制、驱动能效、人机交互与智能协作五大方向,已形成从仿生设计到自主作业的完整技术链,波士顿动力Spot、浙大“...
四足机器人实验核心围绕关节力矩检测、机体运动姿态追踪、多源数据同步采集展开,设备选型需匹配机器人本体参数(负载、关节尺寸、运动速度)、实验精度要求、同步性需求及...
基于动力学仿真的四足机器人关节结构微调,核心是以仿真环境为虚拟测试平台,通过动力学分析量化关节结构参数对机器人运动性能、力学特性的影响,针对性优化参数,解决关节...
平地行走是四足机器人最基础的典型工况,仿真核心围绕单腿支撑/双腿支撑/摆腿相的步态周期切换,精准计算各关节力矩、足端接触力、机身与腿部的受力分布,核心目标是验证...
四足机器人初始模型(多为实验室原型机/初代验证模型)的问题集中在运动性能、环境适配、能耗效率、控制稳定性、工程化落地五大核心维度,本质是“理论运动模型”与“真实...
四足机器人的几何干涉检查是避免运动过程中机身、腿部连杆、关节、足端与自身结构/外部环境发生碰撞的核心环节,结构合理性验证则是从几何维度确保机器人运动范围、负载分...
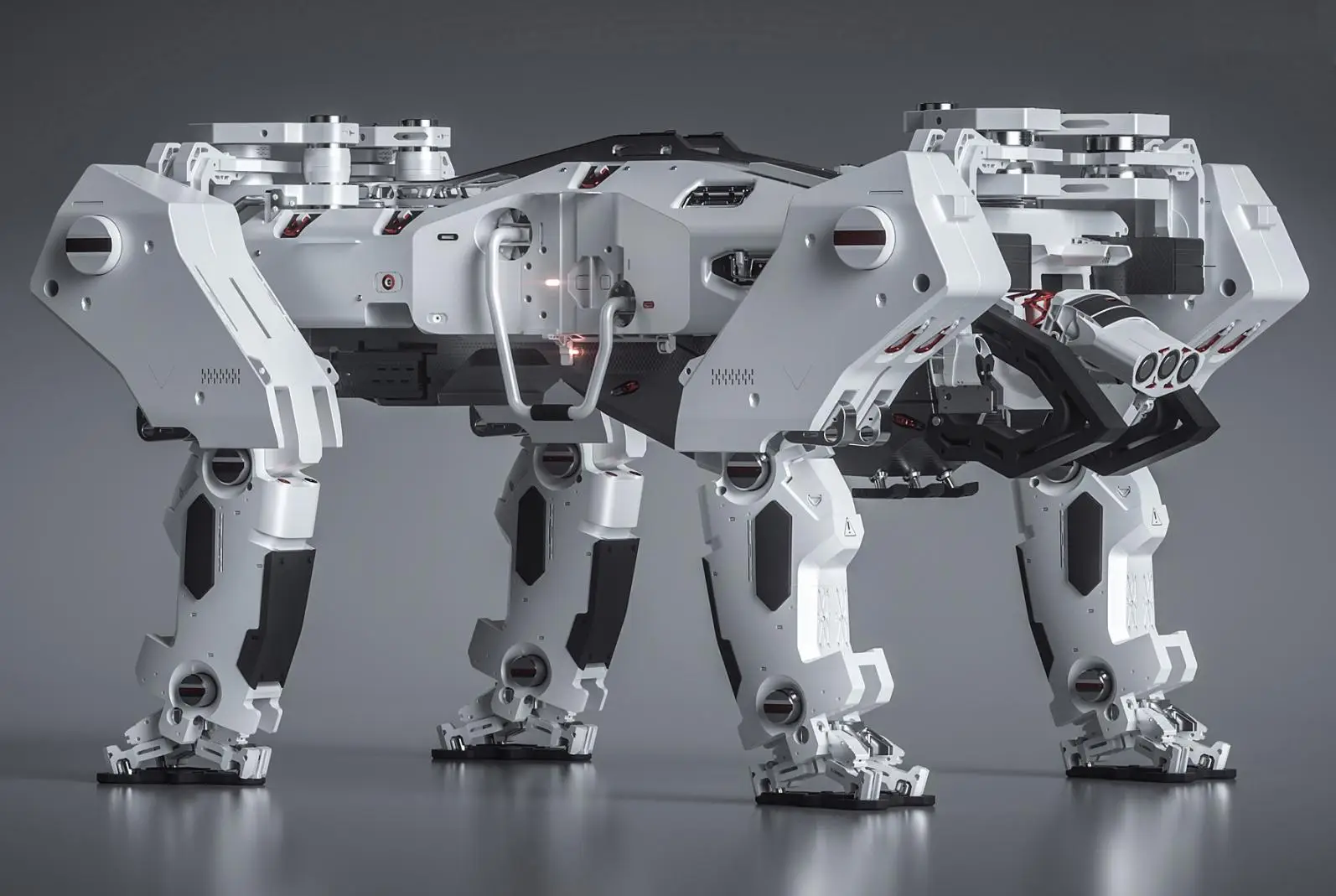
本文围绕四足机器人轻量化、模块化、运动适配性核心设计原则,完成基于SolidWorks/CATIA的初始三维建模,同时对核心结构进行拆解与展示,模型为通用型四足...
四足机器人的关节连接件是仿生物骨骼的核心承力部件,承担着驱动扭矩传递、肢体载荷支撑、运动姿态约束的关键作用,其材料选型和参数设计直接决定机器人的运动性能、续航能...