了解公司最新动态和行业资讯
四足机器人腿部关节结构初始模型设计需要综合考虑机器人的应用场景、运动性能要求、负载能力等因素。以下是设计的主要步骤和要点:
四足机器人的核心竞争力源于对生物运动机理的仿生复刻,但其产业化落地的关键在于突破“仿生复杂度”与“工程实用性”的矛盾。本方案以“生物机理提炼-结构冗余删减-工程...
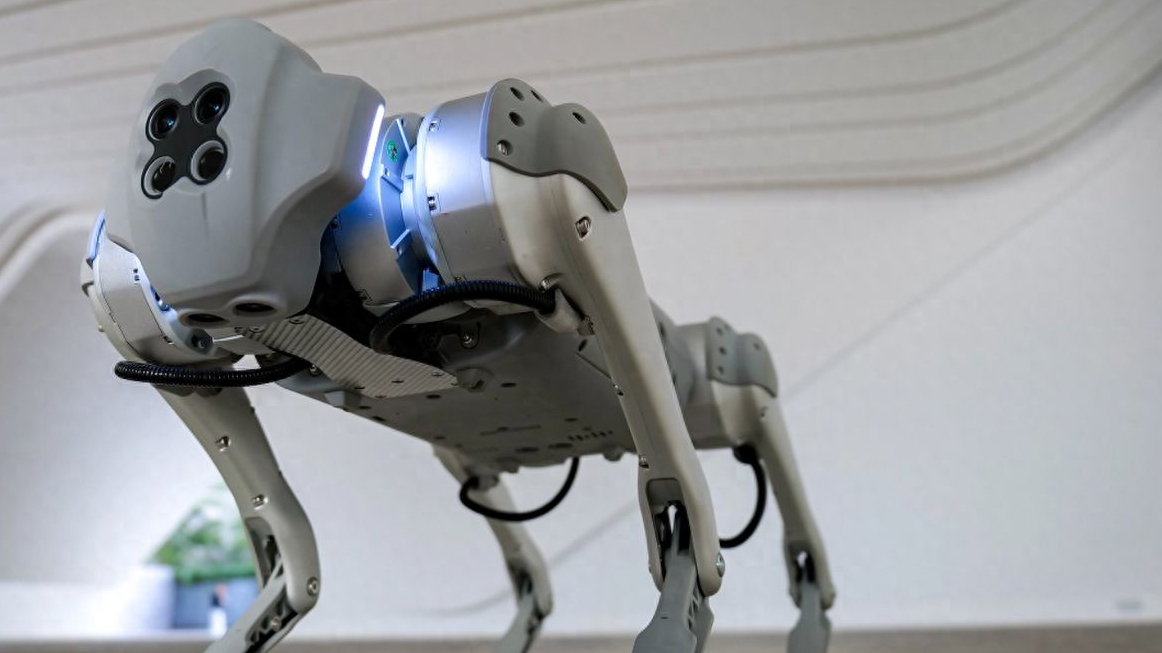
四足机器人的腿部结构是其实现稳定运动、适应复杂地形的核心,其骨骼关节设计通常借鉴哺乳动物腿部的仿生学原理,同时结合工程力学与控制需求进行优化。本文从关节自由度配...
四足机器人的仿生原型选取通常基于对自然界中四足动物的观察与分析,不同的仿生原型赋予机器人不同的特性和优势。以下是一些常见的仿生原型及其对应的结构分析:
在机器人动力学分析中,运动稳定性是衡量机器人(尤其是双足、人形机器人)运动性能的核心指标,ZMP准则和质心轨迹是两类最经典、应用最广泛的评价方法,二者从不同维度...
多体动力学是研究由多个刚体或柔体通过铰链、约束等连接组成的系统的运动与受力关系的学科,广泛应用于机器人(四足、人形)、无人机、航天器等复杂机械系统的设计与分析。...
四足机器人的腿部关节是实现运动、承重、灵活转向的核心部件,轻量化是关节设计的核心目标之一,其本质是在满足性能需求的前提下,最大限度降低关节自身重量,提升整机的续...
机器人关节驱动系统是决定其运动性能、负载能力、适用场景的核心部件,电机驱动、液压驱动、气动驱动是目前主流的三类技术路线,三者在动力特性、控制精度、成本维护等方面...
四足机器人的腿部关节是其实现仿生步态、地形适应和运动稳定性的核心部件,其结构设计参考了马、狗等四足动物的腿部骨骼与关节特征,典型关节包括髋关节、膝关节、踝关节,...
仿生四足机器人的结构设计需兼顾生物运动机理复刻与工程落地可行性,核心准则围绕运动性能、稳定性、环境适应性、轻量化四大核心目标展开,具体可分为以下6个维度: