现有研究存在的不足与本研究切入点
当前相关研究多聚焦于单一维度或局部领域,未能从跨学科、全方位的视角构建完整的研究框架。例如,在社会科学领域,部分研究仅关注微观个体行为,忽视了宏观政策环境、文化...


当前相关研究多聚焦于单一维度或局部领域,未能从跨学科、全方位的视角构建完整的研究框架。例如,在社会科学领域,部分研究仅关注微观个体行为,忽视了宏观政策环境、文化...

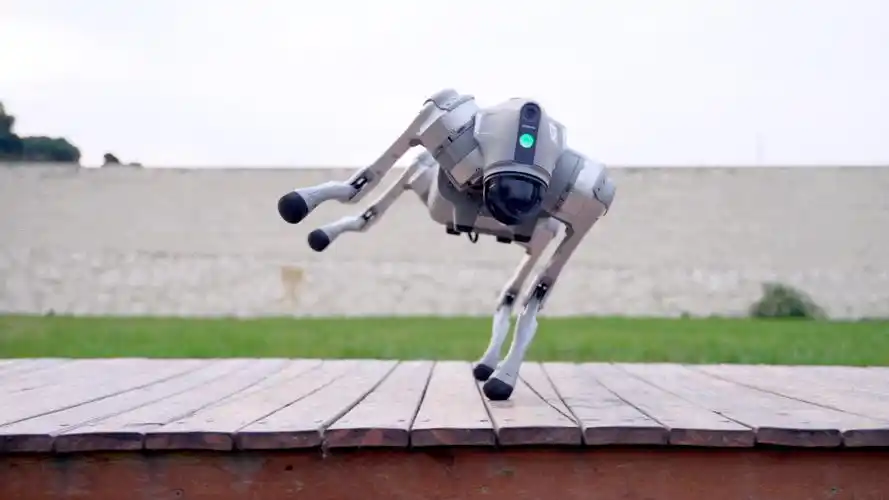
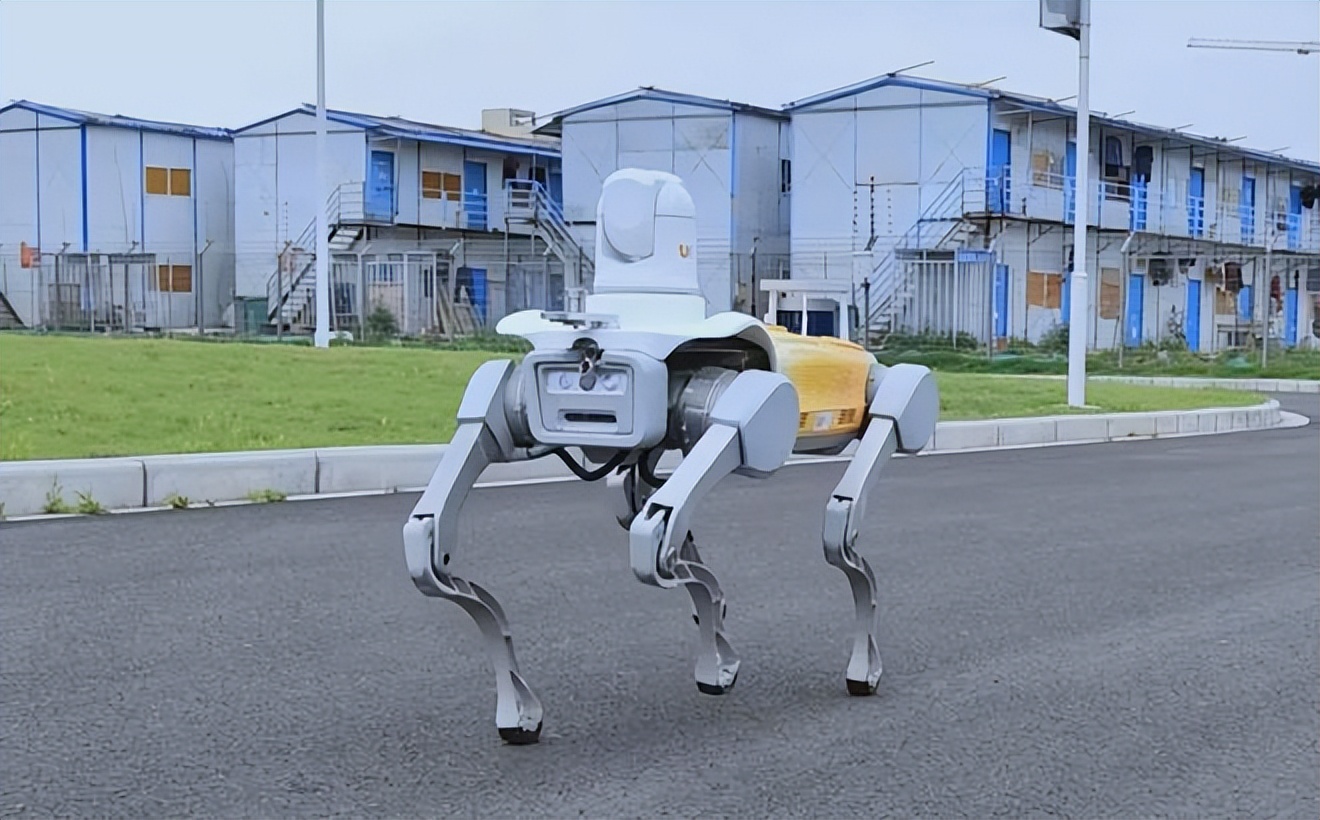
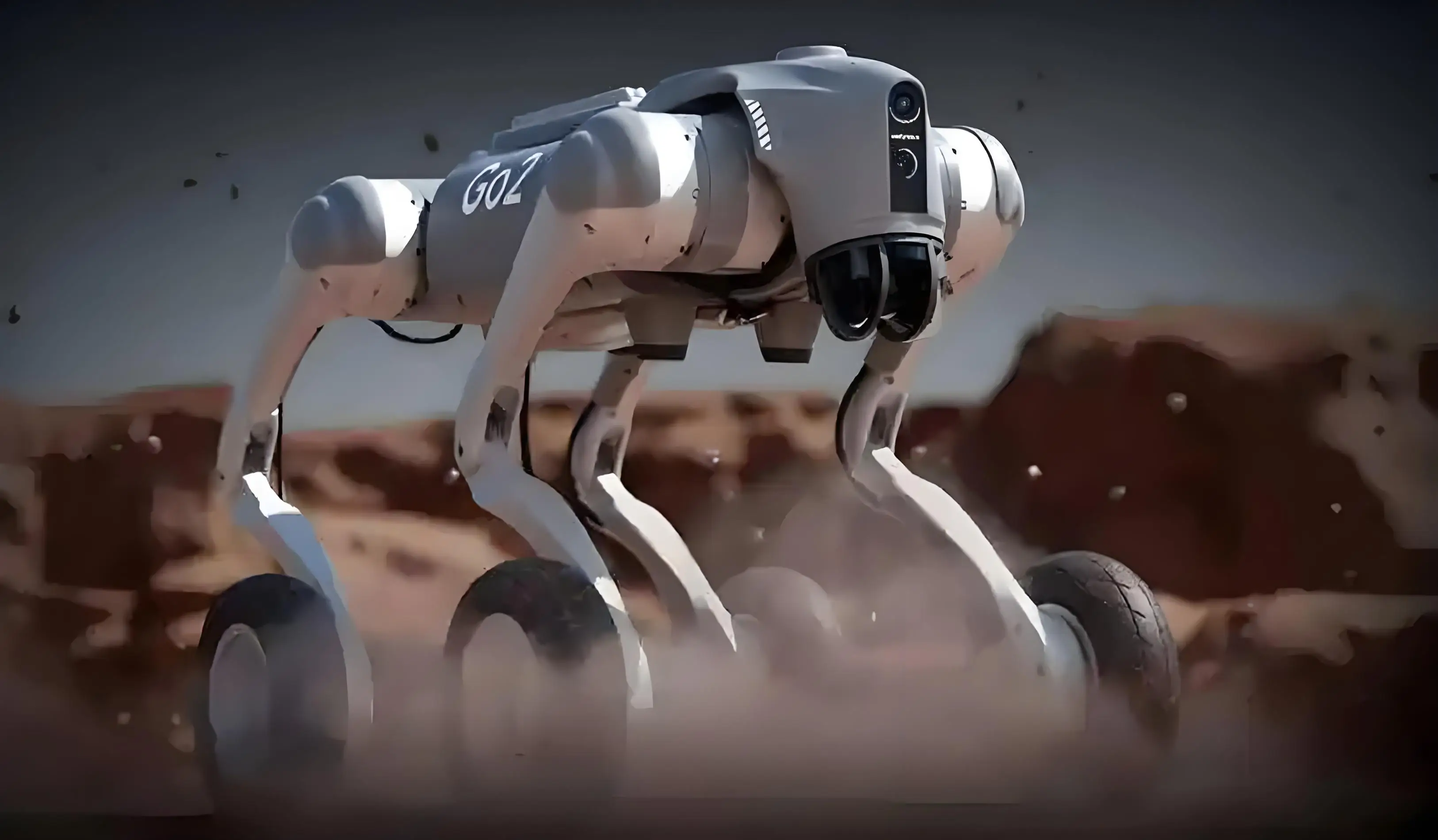
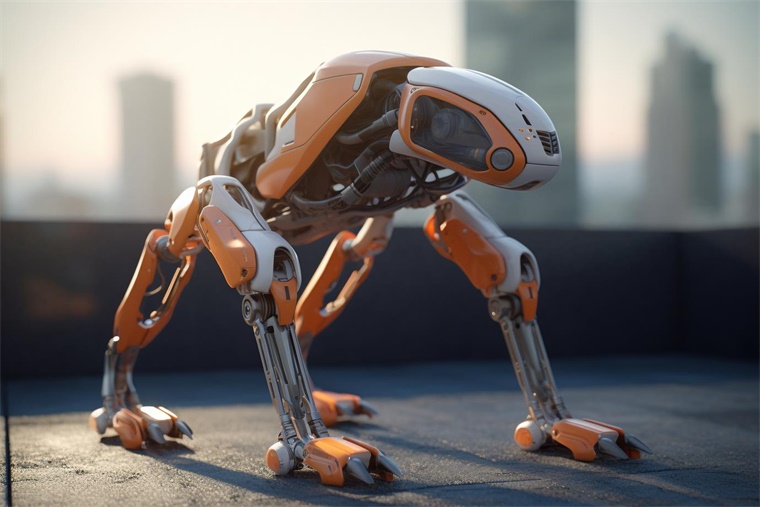
仿生腿部关节结构优化是融合生物学、机械工程、材料科学等多学科的研究领域,核心目标是通过模拟生物关节的运动机理与力学特性,提升关节的灵活性、稳定性、能效及适配性,...